Abstract:
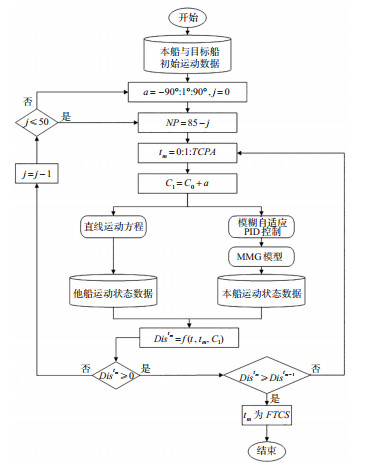
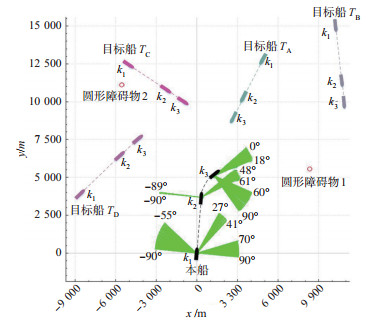
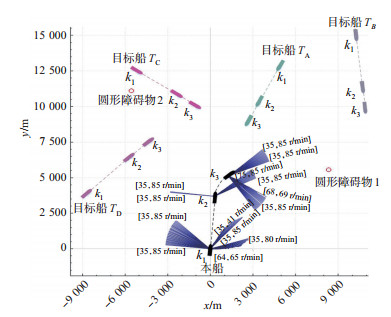
A decision-making method for variable speed automatic collision avoidance of ships in a multi-objective environment meeting the International Regulations for Preventing Collisions at Sea is studied to solve the problem of the poor effect of collision avoidance only by altering the direction in some scenes of ships. The risk of ship collision is quantified based on the four-stage theory of ship encounters and the ship domain model. The variable-speed MMG model and fuzzy adaptive PID heading control method are used to derive the ships' steering process at fixed and variable speeds. On this basis, an algorithm is improved for solving the dynamic feasible maneuvering interval based on the deduction of the maneuvering process and the speed obstacle theory. Combined with the actual scenarios, comparative experiments under different maneuvering schemes, simulations, and multi-objective scenarios are carried out. The results show that: ① The program running step length is set to 1 s. Under the pre-set position of other ship (4 n mile, 4 n mile), heading 270, speed of 12 kn, ship position (0 n mile, 0 n mile), heading 000, speed of 12 kn, the latest time point for maneuvering action to alter directions and speeds for yielding is 711 s. The latest time point for manipulative actions to be taken only by altering directions for yielding is 643 s, and that to be taken is delayed by 68 s. ② In a multi-object environment with distant objects, ship O driving to 663 s and keeping the speed and direction, which poses a collision risk with target ship TA, TC and TD. At this time, any combination of target course interval [48°, 61°] and rotation rate interval [75 r/min, 85 r/min] can clear all targets.